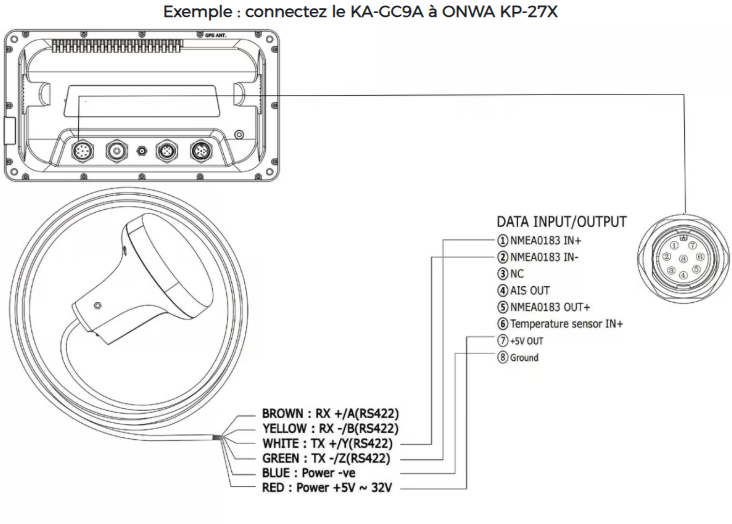
Capteur de cap électronique à 9 axes et module GPS haute fréquence intégré NMEA 0183 - ONWA KA-GC9A


Montage sur support
Montage à plat sur le pont
Capteur de cap électronique à 9 axes avec module GPS haute précision intégré avec sortie NMEA 0183
Cet appareil produit les informations nécessaires au pilotage d'un compas électronique ou d'un pilote automatique. Il peut être réglé pour se rafraîchir 1, 5 ou 10 fois par seconde. Il est indispensable pour afficher votre cap vrai sur votre traceur de cartes et un suivi précis des cibles AIS ou radar. Il ressemble à une antenne GPS classique et, sur un point, il s'en rapproche en utilisant les satellites pour le GPS. Cependant, son boîtier IP67 abrite un dispositif très sophistiqué capable de calculer le SOG, le COG, la position et le cap, le tangage, le roulis et le lacet, et ce, avec une grande efficacité. Dès sa mise sous tension, il obtient un cap en quelques secondes seulement.
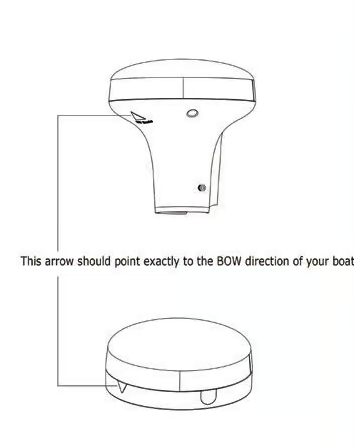
Aussi simple qu'une antenne GPS à installer - il a une flèche de direction sur le boîtier - Installez-le sur une ligne centrale horizontale du bateau et alignez la flèche au centre de la proue et c'est prêt à partir ; toute petite erreur de cap par rapport à un compas de relèvement manuel peut être « peaufinée » par un petit ajustement de l'alignement du capteur de cap. Il est configurable de plusieurs manières à l'aide d'une application gratuite ONWA, mais vous n'en aurez pas besoin car il sera préconfiguré si vous décrivez avec votre commande avec quel autre équipement vous avez l'intention de l'utiliser et comment vous avez l'intention de l'utiliser.
Par exemple, si vous achetez un pilote automatique ONWA, un KA-GC9A est livré préconfiguré en usine et réglé sur une fréquence de rafraîchissement de 10 fois par seconde. Les anciens pilotes automatiques utilisaient un compas Fluxgate pour la détection de position et de cap, mais les pilotes automatiques modernes, tous fabricants confondus, utilisent un capteur 9 axes identique au KA-GC9A, bien qu'ils soient généralement beaucoup plus coûteux. Le KA-GC9A peut fonctionner de 5 à 32 volts et est protégé contre les surtensions et les inversions de polarité. La longueur du câble est de 9 mètres, mais peut être allongée
- Faible consommation d'énergie, 450 mW
- Alimentation : 5V-32V, protégée contre l'inversion de polarité
- Mise à niveau du micrologiciel intégré via des messages NMEA
- Calibrage utilisateur d'exécution
- Unité de mesure inertielle (IMU) à 9 axes, magnétomètres, accéléromètres et gyroscopes fusionnant les données avec un algorithme propriétaire
- Interface utilisateur graphique Windows (E-Compass Manager 9 axes) pour une configuration, une surveillance et des mises à niveau faciles
Orientation dans l'axe du navire : lorsque vous retournez le KA-GC9A, vous pouvez voir une flèche sur la base de l'antenne. Assurez-vous que cette flèche pointe exactement dans la direction de l'axe du navire.
La différence entre la vitesse fond et la vitesse surface comporte une dimension quasi statique due au courant marin et à la dérive et aussi une dimension sujette à des variations rapides dues à l'effet des vagues. Une vague est une onde transversale qui transporte de l’énergie sans déplacer de matière. Dans certains cas, la couche d’eau se déplace dans un mouvement circulaire elliptique et donc induit un vent apparent indépendant de la vitesse surface.
La vitesse surface est la vitesse de déplacement de la coque par rapport à cette couche d’eau.